

Ultrasonic Sensors Knowledge (Part 3): Different Operating Modes

Ultrasonic sensors can be used in different operating modes to achieve the best detection results in different applications. Pepperl+Fuchs gives helpful insights on possible setups...
Pepperl+Fuchs’ ultrasonic sensors determine the distance to an object using the echo transit time method. The measured distance can be evaluated and displayed in different ways. The distance to the object is converted into an analog value and displayed at the analog output (for example, 0-10 V, 4-20 mA) of the ultrasonic sensor. Alternatively, the object distance can be directly transmitted to a controller as a digital value via a special interface like IO-Link.
For ultrasonic sensors with switching outputs, the output state changes when an object is detected within the set switching range. A distinction is also made between NO and NC functions, depending on the response to the object.
For sensors with switching outputs, the following different operating modes can be set using an appropriate assembly and parameterization.
Diffuse mode sensors
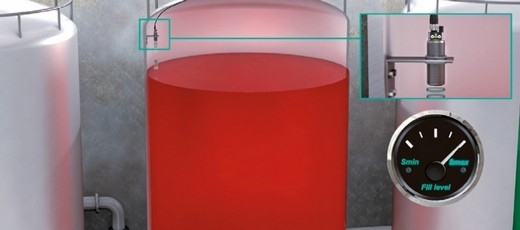
Level measurement in a tank using an ultrasonic sensor in diffuse mode
Ultrasonic sensors are most commonly used in diffuse mode. The emitter and receiver are located in the same housing. The target acts as a sound reflector.
Properties
- Easy to install, only one sensor head
- Foreground and background suppression possible (window mode)
- Object serves as a reflector, alignment is important
- Switching frequency is lower compared to a thru-beam sensor
Retroreflective sensors

Reliable detection of a slanted object on a conveyor belt by using the ultrasonic sensor in retroreflective mode
In retroreflective mode, a permanently installed reflector constantly reflects the ultrasonic signal. An aligned metal or plastic panel can be used as a reflector. An existing background such as a wall, conveyor belt, or the floor can also be used. As long as there is no object between the ultrasonic sensor and the reference reflector, the sensor receives a constant echo from the reflector. When a detected object enters the detection range, the reflection of the ultrasound signal changes and the ultrasonic sensor detects the presence of the object. In general, the following three scenarios trigger switching.
- A small object that is located in front of the reference reflector is detected by the sensor. The ultrasonic sensor receives an extra echo from the reference reflector.
- A large object is detected and completely obscures the reference reflector. The ultrasound sensor receives an echo only from the object.
- A large, slanted object in front of the reference reflector is not detected but obscures the reflector. The ultrasonic sensor does not receive an echo from the object or the reference sensor.
All three scenarios trigger switching at the ultrasonic sensor output. Retroreflective sensors are especially recommended for reliable detection of sound-absorbing objects. They are also suitable for objects without reliably detectable surfaces, e.g. smooth, slanted surfaces such as a car windshield. There are no blind zones in this operating mode.
Properties
- Easy to install, only one sensor head
- Reliably detects problematic objects (sound-absorbing, slanted surfaces)
- Reference object/background is used as a fixed reflector; the object disturbs/breaks the beam
- Switching frequency is lower compared to a thru-beam sensor
Thru-beam sensors

A very high switching frequency is required for bottle counting. Ultrasonic sensors that are applied in thru-beam mode offer a suitable solution for this scenario.
Ultrasonic thru-beam sensors use dedicated emitter and receiver transducers that are contained in two separate housings. The evaluation electronics and outputs are housed with the receiver. The ultrasonic sensors are mounted opposite one another on a common axis. When an object interrupts the sound beam, the sensor switching output is activated. The receiver sensitivity can usually be set (Teach-In, potentiometer) for different intervals between the emitter and receiver and/or for different object sizes. This mode is extremely resistant to external disturbances. It also doubles the range and enables objects to be reliably detected at significantly greater distances. The switching frequency is considerably faster, as the ultrasonic sensor does not have to continuously switch between transmission and reception modes.
Properties
- Two sensor heads must be installed and wired
- Long range - a large distance between emitter and receiver is possible
- Reliably detects problematic objects (sound-absorbing, slanted surfaces)
- Very high switching frequency, defined response characteristics
PDF Downloads: Technology Guides Ultrasonic Sensors

Pepperl+Fuchs offers you various downloadable documents containing knowledge on ultrasonic sensors. In addition to a general technology guide on ultrasonic sensors, you can now download a new guide focusing on double material detection with ultrasonic sensors. Get your free PDF documents and benefit from valuable insights and advice for your field work!
- Ultrasonic Sensors Knowledge (Part 1): Technology and Functionality in a Nutshell
- Ultrasonic Sensors Knowledge (Part 2): Influences on the Sound Beam
- Ultrasonic Sensors Knowledge (Part 3): Different Operating Modes
- Ultrasonic Sensors Knowledge (Part 4): Influences on Measurement Accuracy
- Ultrasonic Sensors Knowledge (Part 5): Simple Installation and Assembly
- Ultrasonic Sensors Knowledge (Part 6): Synchronizing Ultrasonic Sensors


Pepperl+Fuchs AS
Frednesøya 21
3933 Porsgrunn
Norway
info@no.pepperl-fuchs.com
 +47 3557 3800
+47 3557 3800
Pepperl+Fuchs er en ledende leverandør innen utvikling og produksjon av produkter til det globale automasjonsmarkedet. Kontinuerlig innovasjon, høy kvalitet og kontinuerlig vekst danner grunnlaget for vår kontinuerlige suksess i mer enn 70 år. Pepperl+Fuchs-konsernet har i dag mer enn 6300 ansatte globalt. Produksjonen er basert på ISO 9001 og finner sted i Tyskland, USA, Singapore, Ungarn, Indonesia og Ungarn.